“拍照 + 点云 + 倾斜摄影”结合在输变电三维建模过程中的应用
文 / 2020-12-31 07:12
湖北电力勘测设计院 梁金正
摘 要: 仅使用无人机拍摄自动化生成的实景三维模型存在着远观逼真,但近看失真的问题。通常解决方法是人工添加模型贴到三维模型上。生产成本高且效率低下。为了解决这种矛盾,本文探讨了“拍照 + 点云 + 倾斜摄影”空地融合生成实景三维模型。即利用无人机倾斜摄影和地面定点拍照的方式获取照片资料,激光点云进行实时建模,利用该空地两类照片资料以及点云生成部分通过人工添加同名点的方式进行自动融合,最终生成高模型与位置的实景三维模型。
关键词: 激光点云技术;空中三角测量;无人机倾斜摄影;地面定点拍照;实景三维模型;
1引言
随着无人机航摄技术与高精度差分系统的应用,实景三维自动化建模软件的普及,无人机倾斜摄影实现自动化实景三维建模的技术已成为较为成熟的技术,这种模式生成的三维模型成果应用也越来越广泛。
倾斜摄影测量是通过在同一飞行平台上搭载多台传感器,同时从垂直、前方、后方、左侧、右侧 5 个不同的角度采集影像。无人机倾斜摄影自动化实景,三维建模生产的三维模型成果,较为普遍的应用就是倾斜实景三维模型进入各种信息系统,成为各种信息三维表达的位置参考和属性挂接载体。由于信息采集不到位,大部分单独使用无人机倾斜摄影自动化生成的实景三维模型在近地表视角会发生模型体凹凸甚至失真。为了解决这种矛盾,建模单位多采用将实景三维建筑模型体单体化的方式使模型逼真,但是由于坐标数据和模型纹理数据的采集与处理均需要大量的外业和内业工作,这使得不仅工作量大,而且周期较长,建模效率大大降低。为了解决矛盾,本文研究了“地面拍照 + 激光雷达 + 倾斜摄影”空地融合自动化实现实景三维建模的解决方案,将空中与地面视角拍摄的照片优势互补,满足远观近看的浏览需求。利用无人机倾斜摄影照片和地面定点拍照的照片进行空地融合,然后通过高密度、高精度的激光点云数据反映点位的三维坐标,经过自动或人工交互处理,把非地形目标上的点云进行分类、滤波或去除,构建不规则二角网,快速提取 DEM,最后生成高精度实景三维模型。该技术具有获取数据真实、精度高、速度快的特点和优势,可以真实映射我们所处的世界三维环境。
2空地融合解决方案简要流程
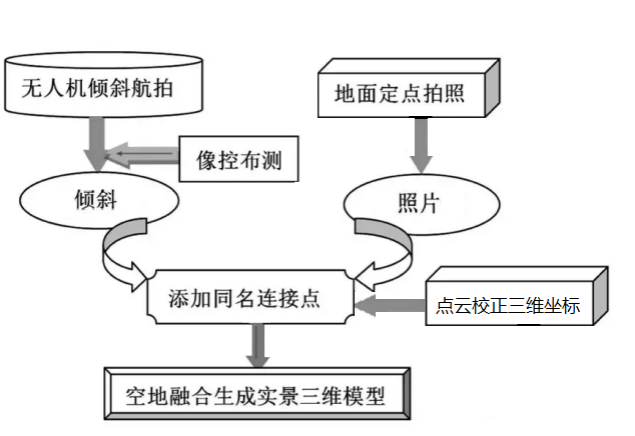
图1 空地融合解决方案流程图
3空地融合实景三维建模解决方案
本方案流程是:
早晨(光照不符合航飞作业,此时可以进行像控点布测)不进行作业;
在10点至3点光照合适时进行低空高分辨率无人机倾斜航拍; 在进行航飞时,飞行过程留一人进行监控,剩下的人员进行目标建筑物地面定点拍照。

内业运用该倾斜航片配以实测地面像控点进行高精度区域网倾斜空中三角测量,形成带真实坐标的高精度倾斜空三成果; 同时利用地面定点拍摄的照片进行无控制空中三角测量,形成不带真实坐标的空三成果; 接着运用添加连接点的方式,将两台电脑中无坐标的地面空三成果配准到高精度倾斜空三成果中。最后自动进行空地融合区域网空三平差解算,随后结合定点激光点云生成的高精度坐标进行校准,最后获得实景三维模型。
3. 1 无人机倾斜航拍
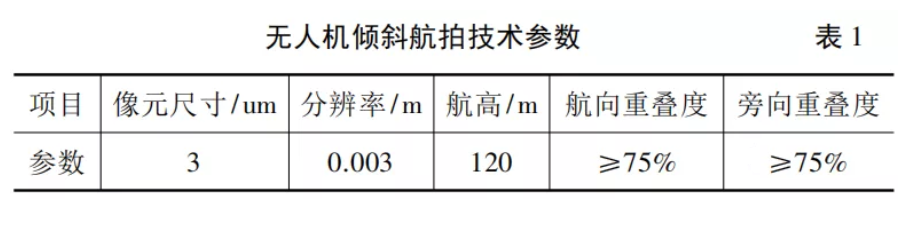
无人机倾斜摄影一般采用DJI多旋翼无人机系统执行,飞前利用已有的参考资料( 地形图、影像图、DEM 等) 进行航线的规划和像控点设计,保证航飞的有效与安全。无人机搭载5镜头相机一次曝光可获取地面5个方向的高清晰度照片。无人机上搭载RTK系统,能实时记录曝光点位置信息,配合GNSS 连续运行参考站系统模拟虚拟基站数据,通过后差分解算获取照片曝光时刻的准确空间位置,减少地面控制点的同时,大大提高后续区域网空三摄影精度,保证基础资料可靠性。主要技术参数如表 1 所示:
要求:
①航片成果数据、PPK 数据、POS数据数量一致;
②航片色调基本一致、细部纹理清晰、对比度及曝光量适当,无条带、色斑等缺陷。
3. 2 地面定点拍照
拍照法则: 多角度、高重叠、高分辨率。
拍照方法: 围绕目标建筑物四周,等间距逆时针或顺时针拍照; 相邻两个拍照点正对目标物拍照的照片保证有60%重叠;每个拍照点拍 3 张照片,3 张照片内每张照片夹角小于 15°。
拍摄方法如图 2 所示:
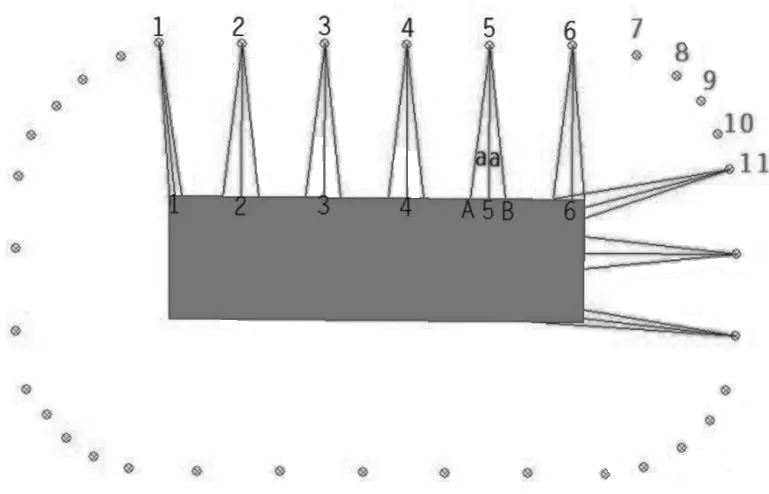
图 2 地面定点拍照方法示意图 图中: 1、2、3、4、5、6 是拍照点位; 照片 1、2、3、4、5、6为相邻点位主视图照片,他们之间重叠度大于 60%, 以此来决定拍照点位的间距; 角 a < 15°; 点位上的三张照片为左(A)、主片(5) 、右片(B) ,主片为正对目标物的照片。拍照点位根据主片重叠度决定。
3. 3 激光点云提取数字高程数据DEM
激光点云技术最主要的数据产品是高密度、高精度的点云数据,该数据直接反映点位的三维坐标。通过自动或人工交互处理,把人射到植被、房屋、建筑物等非地形目标上的点云进行分类、滤波或去除,然后构建不规则二角网TIN,就可以快速提取 DEM。机载激光雷达优化技术提取的地面三维坐标,满足高精度影像微分纠正的需要,使得数字正摄影像图(DOM)的生产变得相当容易,无需使用数字摄影测量昂贵的专业数据处理平台,在一般的遥感图像处理系统中即能实现规模化生产。
激光雷达具有穿透植被的能力,可以测量植被覆盖下的地形。适合做高精度地形测量与工程勘测、以及对精度要求很高的工程测量应用。
3. 4 区域网倾斜摄影与地面照片
本方案采用多视角相机镜头获取多角度影像,通过全自动化后期处理软件 Bentley Contextcapture 快速获取城市实景三维模型。首先无人机航拍照片数据整理后,在区域网空三摄影软件中创建一个测区block 1,导入航片数据进行预处理,然后进行像控点刺点,后进行区域网多镜头联合平差倾斜空三摄影,得到带真实坐标的倾斜成果。采用普通数码相机或智能手机拍摄获取地面照片,然后使用 Bentley Contextcapture 进行基于多视照片的三维重建。首先将地面定点拍照的照片清除废片后,然后在区域网摄影软件中创建一个测区 block 2,导入照片进行地面照片空三摄影解算,得到无坐标的地面照片摄影成果。
3. 5 添加连接点
在 block 1 中,在两类空地照片同一目标建筑上同名位置选取每个墙面至少3个点作为同名连接点,选点时选取在地面照片上容易找到并合理分布的点,然后进行刺点,并截图保留点位图; 最后导出这些连接点作为 block 2 的控制点。
在block 2中,把 block 1中的连接点作为控制点导入摄影平台,根据保留的点位图进行刺点,然后选择刚性配准运行空三解算。此时 block 1与block 2 就通过刺入的连接点做了匹配,使得 block 2 具有了跟block 1 相同的坐标位置信息。
3. 6 空地融合创建实景三维模型
将经过两个block 1测区与block 2测区的成果进行合并,然后创建新的生产项目,提交生产生成空地融合后的实景三维型。此时生成的实景三维模型具有倾斜三维模型的上空效果,也具有接近地面视角的效果,尤其在高楼建筑物的通道方面,镂空的部分无须进行人工处理。
4总结及展望
在三维输电线路计平台里线路走廊三维实景呈现可交互、可量测的方式进行展示,为变电站选址、输电线路优化选线、断面图快速生成、杆塔排杆、杆塔线路三维立体、三维输电线路设计成果输出、输电线路全过程机械化施工方案编制、施工管理、辅助运维检修等工作提供有效的数据支撑和技术手段。准确、精细的三维实景模型是三维设计平台工作的基础数据,倾斜摄影测量和激光雷达测量在三维建模有很大技术优势。目前,国内外针对三者的结合应用研究较少。通过探讨倾斜摄影,拍照和点云测量技术融合的方法,来实现对实景三维模型进行精细化建模的要求。

